雷达学习笔记汇总
机载雷达
机载雷达是飞机上各种雷达总称,是飞机获取信息的关键装备,主要用于侦察、监视、预警、目标指示和武器制导控制、环境探测以保障航行安全。受飞机平台约束和下视探测的要求,机载雷达集中反映了雷达新技术。
1 机载脉冲多普勒雷达 2 雷达原理与系统 3雷达发射机接收机 4雷达接收机 5雷达接收机 6雷达接收机 7 雷达探测距离
雷达杂波建模方法
基本概念汇总
脉冲多普勒(PD)雷达是一种利用多普勒效应检测目标信息的全相参体制的雷达,能实现对雷达信号脉冲串频谱单根谱线滤波(频域滤波),具有对目标进行速度分辨的能力。
如果信号的采样率低于两倍奈奎斯特频率,采样数据中就会出现虚假的低频成分。 这种现象便称为混叠。采样频率如果太低就不能正确还原真实信号;但是如果采样频率太高,会有较大的频率分辨率,同时又会有产生大量的数据。通常,在实际应用中采样频率会选择比两倍奈奎斯特频率要大一些(比如3~5倍)。
其实杂波是啥,杂波就是我们不感兴趣的静止目标回波。机载雷达对地看,肯定是有大量静止目标回波的,地面,建筑物等等。那地基雷达有时候也会有杂波的,比如山之类的。对于静止目标的回波,机载和地基最大的区别是雷达动不动,地基雷达不动,所以二者之间的多普勒始终是0,处理起来就很容易,相邻脉冲做减法就能去掉,其实就是只抑制零频的回波就行了。机载雷达是运动的,那个每个慢时刻二者相对多普勒频率都在变,就导致静止目标的回波不是在一个频点上,而是在一个带宽内,书上一般称为杂波多普勒带宽,那么抑制就比较麻烦了。在一个相干处理时间内,一个静止目标的回波是有一定带宽的。杂波多普勒带宽是指观测区域内,所有静止目标的带宽的并集。
阅读代码总结
目标回波建立
1.根据处理数据的帧数目以及每一帧(一个CPI内)脉冲的个数以及脉冲的重复频率(周期)建立慢时间轴
2.计算每一个脉冲期间(以初始时刻为标准)时,雷达和目标的位置,距离以及速度在视线方向上得投影,用于计算多普勒频率
3.设置快采样时间
网页资料合集
Matlab之机载雷达系统中的空时自适应处理(STAP)技术
空时二维自适应处理-相控阵雷达二维杂波谱分布仿真Matlab
关于雷达目标RCS起伏的Swerling模型附matlab代码
现代雷达电子战系统建模与仿真
杂波抑制
Space Time Adaptive Processing(STAP)/空时自适应处理的简单分析与仿真 重要******
和差STAP
目标检测
CFAR算法
读书笔记 | 自动驾驶中的雷达信号处理(第5章 雷达目标检测 )
干货 | 再次解读雷达信号处理中的快速二维CFAR(2D-CFAR、十字CFAR)检测算法
雷达目标检测之恒虚警检测(CA/SOCA/OS/GOCA-CFAR)【附MATLAB代码】
[雷达无线电系列(二)经典CFAR算法图文解析与实现(matlab)
雷达无线电系列(三)经典CFAR算法门限因子alpha计算(matlab)
干货 | FMCW雷达信号处理的二维CFAR(2D CFAR、十字CFAR)检测算法
基于瑞利分布的双参数CFAR算法 **此处关于杂波块的划分甚为巧妙
积累检测

基于后验概率的值函数
$\mathrm{I\left(x_{k+1},k+1\right)=\max_{x_k}\left{I\left(x_k,k\right)+\log p\left(x_{k+1}\left|x_k\right.\right)\right}+\log p\left(z_{k+1}\left|x_{k+1}\right.\right)}$
$p(z_{i,j}\mid x_{k})=\frac{1}{\sqrt{2\pi}\sigma}\exp(-\frac{(z_{i,j}(k)-A)^{2}}{2\sigma^{2}})$
[雷达回波序列中弱小飞机目标检测跟踪数据集] 楼上的数据集
基于动态规划的弱目标检测前跟踪算法
检测前跟踪就是用多帧数据积累某些东西的方式来提高回波的信噪比。例如用标准霍夫变换来积累能量——SHT-TBD,用动态滤波来积累最优值——DP-TBD
- 传统的检测跟踪是跟踪前检测(detect-before-trace,DBT)
对于DBT,它是直接采用低门限或者无门限处理的的传感器的原始观测数据,然后进行数据信息的挖掘,通过在时间上的观测积累,提高信噪比,以此达到对于目标的跟踪,在高的信噪比下DBT的检测效果较好。但是对于信噪比较低的目标,若要仍使用DBT进行检测跟踪,则需要降低门限或者提高传感器的灵敏度,但是会提高虚警率以及无效的回波信号。因此,在低信噪比下,DBT达到的效果并不是很好。对于加强信号处理提高信噪比以满足DBT门限处理的要求,可以对于信号进行长时间的相参积累来实现。因为在长时间的相参积累中,可以增加实际利用的目标回波信号能量,能够有效地提高雷达检测性能。目前,传统的相参积累都是通过FFT进行的。但是这是建立在一个大的前提条件上的,即在波束驻留期间,目标的移动要近似匀速直线运动,多普勒频率为常数,切回波包络的移动不超过一个距离门。在长时间进行观察时,上述条件将不会成立。对于FFT也不能将全部的回波能量完全积累。同时,对于相参积累,整个系统的造价也较高。因此,我们要进行探索更加有效的相参积累或非相参积累方法。
- 检测前目标跟踪(TBD)
检测前跟踪(trace-before-detect,TBD)是针对于弱目标的检测跟踪提出的。
对于弱目标的检测跟踪,TBD作为一个典型的强非线性问题,可以进行非相参积累,能够达到较好的效果。
- 对于TBD,其有以下的优点:对于原始的传感器数据进行直接的处理,处理得到的信息并随着时间的积累而进行,对于目标的决策位于整个处理链的最后一步。
粒子滤波
一篇博客彻底掌握:粒子滤波 particle filter (PF) 的理论及实践
核心思想:是使用一组具有相应权值的随机样本(粒子)来表示状态的后验分布。该方法的基本思路是选取一个重要性概率密度并从中进行随机抽样,得到一些带有相应权值的随机样本后,在状态观测的基础上调节权值的大小、和粒子的位置,再使用这些样本来逼近状态后验分布,最后将这组样本的加权求和作为状态的估计值。
分布式
分布式滤波、多源信息融合与多目标跟踪技术及其Matlab代码
Matlab技巧汇总
基本运算
归纳总结MATLAB中与矩阵运算有关的算术运算符(加、减、乘、除、点乘、点除、乘方、转置等)
- 特征值和特征向量的计算
[V,D]=eig(A);
matlab求逆运算左除(\)和右除(/),inv,pinv的用法及区别
- 多变量赋值方法,用于解决传递参数过多问题。使用元组传递。
x={10 20};
[a,b]=x{:};
%a=10,b=20
- sin的计算
sind(180); %0
sin(pi);%1.2246e-16
permute—置换数组维度
- 删除数组中某些指定的数
protect(protect<1) = [];
protect(protect>numfast(k)) = [];
R_search_Index=(IndexR-R_Span_Index):(IndexR+R_Span_Index);
R_search_Index(R_search_Index<1) = [];
R_search_Index(R_search_Index>numfast(k)) = [];
D_search_Index=(IndexD-D_Span_Index):(IndexD+D_Span_Index);
id_small=find(D_search_Index<1); D_search_Index(id_small)=D_search_Index(id_small)+doppler_num(k);
id_big=find(D_search_Index>doppler_num(k));
D_search_Index(id_big)=D_search_Index(id_big)-doppler_num(k);
setdiff:设置两个数组的差集
C = setdiff(A,B) 返回 A 中存在但 B 中不存在的数据,不包含重复项。C 是有序的。
如果 A 和 B 为表或时间表,则 setdiff 返回 A 中存在但 B 中不存在的行。对于时间表,setdiff 在确定相等性时会考虑行时间,并按行时间对输出时间表 C 进行排序。
- 图像标题引用变量
title(sprintf("%d次拟合曲线", i))
title ( ['运行时间: ',num2str(i) ] );
- 输出临时运行阶段
disp(['Clutter Radar : ',num2str(j),' Frame : ',num2str(k)]);
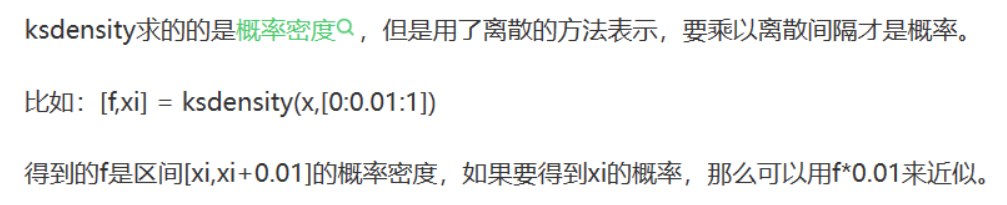
- 概率密度函数求解
傅里叶变换那些事
- matlab中的fftshift和ifftshift 函数的区别与使用
首先,ifftshift和fftshift执行的都是圆周位移的操作。fftshift是将数组或矩阵按正方向(向右和向下)做圆周位移,而ifftshift是按负方向(向左和向上)做圆周位移。圆周位移的步长等于数组或矩阵长度的一半,对于偶数是N/2,对于奇数是(N-1)/2。这也就是为什么对于偶数长的数组,fftshift和ifftshift的结果相同,而对于奇数长的数组,两者结果却不一样的原因。
关于MATLAB中fft,fftshift,fftshift(fft(fftshift(x))),FFT要乘以dx 等问题理解 重要!!!重要!!!
Why_use_fftshift(fft(fftshift(x)))__in_Matlab
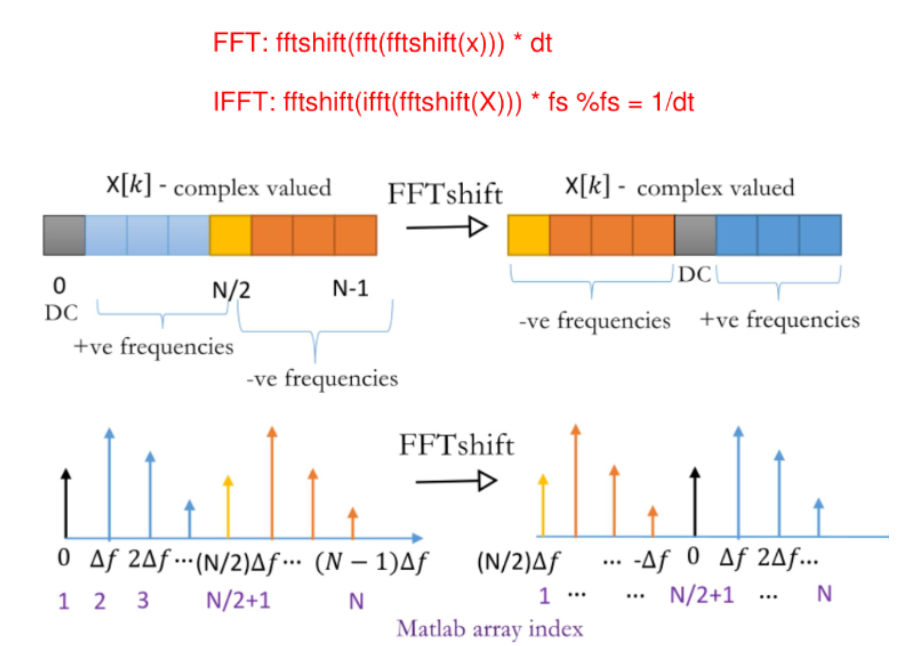
注意:偶数的频率范围$(-N/2:N/2-1)\times \Delta f$
绘图
figure(1);
colormap(jet);
surf(fd_n,fs_n,P);
shading interp;lighting gouraud;colorbar;
title('杂波功率谱');xlabel('fd');ylabel('fs');zlabel('P/dB');hold on; %绘制杂波功率谱图
雷达知识汇总
总体资料
关于雷达算法,我个人认为可以分为两个部分,第一个部分是CFAR检测算法以及CFAR检测算法之前的部分,称为雷达信号处理算法,包括距离估计(测距)、速度估计(测速)、角度估计(测角)、CFAR检测等目标检测算法,以及波束形成、旁瓣抑制、相干积累(相参积累)与非相干积累、幅相校正、多普勒相位补偿、数字波束形成(DBF)、杂波抑制、脉冲压缩、动目标显示(MTI)、动目标检测(MTD)、合成孔径成像算法例举未全)等等。(此部分比较重视数学基础、信号理论与处理算法,是学习雷达信号处理的关键部分。
第二个部分是CFAR检测算法之后的部分,称为雷达数据处理算法,包括聚类算法、跟踪算法、航迹关联算法,以及雷达数据结合人工智能(AI)等算法(例举未全)。此部分偏重于数据处理和信息处理算法,对于雷达上报的点云数据(散点)需要采用各种不同的算法来实现所需要达到的指标,个人认为更看重数学理论、计算机算法以及数据处理能力
基本概念
雷达入门课系列文章(1)| 基于MATLAB的雷达信号处理实验教程
相参脉冲积累是如何积累到一起的? 重要※
算法
脉冲多普勒PD及其MATLAB实现_脉冲压缩,采用pd处理方法进行测速
相关专业知识汇总
信号类
各种比
- 信噪比$\mathrm{SNR}=10\mathrm{lg(P_S/P_N)}$
SNR:信噪比,单位是dB;PS:信号的有效功率;PN:噪声的有效功率。
- 信干噪比SINR(Signal to Interference plus Noise Ratio)$\mathrm{SINR}=10\mathrm{lg}[\mathrm{P}_\mathrm{S}/(\mathrm{P}_\mathrm{I}+\mathrm{P}_\mathrm{N})]$
SINR:信干噪比,单位是dB;PS:信号的有效功率;PI:干扰信号的有效功率;PN:噪声的有效功率。
注意,求解平均功率时可以是复数绝对值的平方!!!
数学类
arg
arg 是变元(即自变量argument)的英文缩写。
arg min 就是使后面这个式子达到最小值时的变量的取值
arg max 就是使后面这个式子达到最大值时的变量的取值
例如 函数F(x,y):
arg min F(x,y)就是指当F(x,y)取得最小值时,变量x,y的取值
arg max F(x,y)就是指当F(x,y)取得最大值时,变量x,y的取值
db的计算
功率在dB运算的时候用10,电流电压用20。
工具类
工具网站
grammarly-实现实时语法错误查找,还提供详细的解释和修改意见。
Virtual Writing Tutor-计算单词,检查拼写,检查语法和标点符号,检查释义,改进单词选择,自我评估目标结构的使用
白嫖这12个插件,让你的Zotero成为地表最强文献管理器!
TeraCloud更名了,支持Webdav,永久 25 GB获取方法
latex
Visual Studio Code (vscode)配置LaTeX
pdf转word使用pandoc
英语学习
PPT制作要求
- 算法原理介绍+仿真结果验证 的格式。
- 原理介绍不用放太多公式,把基本原理,关键公式结合自己的理解讲清楚。仿真结果部分要先讲仿真背景,参数,再放结果,最后是对结果的分析
标签
reason 原因 灰色
conclusion 结论 黄色
advantage 优点 灰色
disadvantage 缺点 灰色
theory 理论 黄色
专有名词和公式 蓝色
hypothesis 假设
橙色:专业不完整的术语
专业英文缩写
$P_D$:检测概率 :已知噪声加信号的PDF以及检测门限,求积分
$P_{Fa}$:虚警概率:已知噪声PDF以及检测门限,求积分
SIR:信干比 SNR:信噪比 SCR :信杂比
SAR:合成孔径雷达
PRI:脉冲重复间隔 同IPP:脉冲内间隔 CPI:相干处理时间
PRF:脉冲重复频率
STALO:稳定本振
STAP:空时自适应处理技术
CFAR:恒虚警概率检测
ECM:电子对抗
EA:电子攻击
duty cycle :占空比
numRows,numCols 行数和列数

